Межрегиональная
организация радиолюбителей
спутниковой радиосвязи
AMSAT-R
| Фото-архив Hardware Software Микро-спутники Проекты * Карта сайта * |

Межрегиональная
|
|
|
'RISC – благородное дело' - это девиз группы разработчиков радиоаппаратуры, в состав которой входят Chuck Green (N0ADI), Peter Guelzow (DB2OS), Lyle Johnson (WA7GXD), Karl Meinzer (DJ4ZC) и James Miller (G3RUH), которая в максимально короткие сроки произвела разработку нового мощного бортового компьютера для использования в составе аппаратуры радиолюбительских спутников связи. Если дальнейшие испытания и доработка компьютера пройдут успешно, то боевое крещение он пройдет на борту радиолюбительского спутника 'Phase-3D'.
Уже в ходе разработки самого спутника стало ясно, что ранее разработанный бортовой компьютер (БК) малопригоден для осуществления современных проектов. С другой стороны, технология, по которой был изготовлен старый БК показала себя как исключительно надежная, что было подтверждено в 80-е годы успешными запусками спутников 'OSCAR-10' и 'OSCAR-13'. Ясно, что БК является наиболее ответственной частью бортовой аппаратуры, потому что выход из строя БК влечет за собой прекращение функционирования спутника, и этот момент, поэтому в первую очередь мы рассмотрели вопрос использования в новом компьютере старой проверенной
технологии.
Старый БК базировался на технологии 'COSMAC 1802', разработанной еще в 70-е годы. Выяснилось, что использовавшийся ранее 8-разрядный микропроцессор до сих пор серийно производится корпорацией HARRIS. Однако, для использования в составе БК потребовались микропроцессоры этой серии, защищенные от воздействия радиации, несколько экземпляров которых, оставшихся от предыдущих проектов, любезно были предоставлены лабораторией Sandia Labs. Процессор работает с тактовой частотой 1.6 MHz с производительностью порядка 100000 операций в секунду. По современным понятиям, это очень низкая производительность, однако в Космосе все происходит так медленно, что большую часть времени БК тратит на выполнение холостых циклов ожидания.
Одновременно с поиском старого процессора было проведено исследование нескольких альтернативных предложений, в связи с тем, что на рынке появилось большое предложение так называемых встраиваемых процессоров прикладного назначения, в число которых входят и процессоры PENTIUM. Основная масса новых процессоров была однако после непродолжительного тестирования отброшена из-за чрезмерного теплового рассеивания или по причине того, что они не были предназначены для работы в космосе. Таким образом для дальнейших исследований были оставлены процессоры на базе полностью статической КМОП-технологии с очень низкими показателями потребляемой и рассеиваемой мощности. Современные процессоры типа PENTIUM потребляют более 5 А (наверное все пользователи компьютеров хотя бы один раз испытали раздражение от шума вентилятора, используемого для отвода выделяемого процессором тепла), таким образом использование их в составе БК невозможно.
Параметр рассеиваемой мощности также очень важен по той причине, что в условиях вакуума физически возможен эффективный теплоотвод не более чем 15-20 мВт с квадратного сантиметра идеальной абсолютно чёрной поверхности. Осуществление дополнительного охлаждения механически затруднено и трудно реализуемо на практике, в то время как повышение температуры процессора всего на 10°С приводит к сокращению срока его службы в два раза.
Не менее, а может быть даже и более важным критерием выбора, чем характеристики самого процессора, являлось наличие программных средств для него. В новом БК было решено использовать в качестве операционной системы IPS, тот же тип операционной системы, что применялся и в предыдущих разработках (при отладке программного обеспечения для старого БК использовались компьютеры ATARI 800 с операционной системой IPS). Для этой операционной системы существует масса программных продуктов от Ассемблера до Си, в последнее время также ведутся разработки подобных программ для разработки программного обеспечения для этого типа операционной системы на РС совместимых компьютерах, однако они до сих пор не завершены.
Первоначально планировалось использовать для разработки и отладки программного обеспечения компьютеры ATARI ST с процессором 68000, однако вскоре ATARI закрыла свой компьютерный бизнес и сняла с производства эту модель, так что от этой затеи пришлось отказаться. James Miller (G3RUH) предложил использовать ранее им применявшийся компьютер 'Acorn RiscPC', широко распространенный в Англии и позволяющий работать в среде операционной системы IPS. Нам понравилась мысль использовать другой компьютер для работы, потому что такой 'перекрестный метод' позволяет устранять непредсказуемые ошибки, которые совершенно недопустимы в таких программах, как например программа 3-х осевой стабилизации космического аппарата. Кроме того, нам очень не хотелось использовать старый компьютер по причине 'повышенного комфорта' при работе на нём (единственным возможным накопителем на ATARI 800 был бытовой кассетный магнитофон).
Компьютер 'Acorn RiscPC' построен на базе процессора SA-110 StrongARM производства фирмы DEC. Тактовая частота процессора 233 MHz. Несмотря на высокую тактовую частоту процессор остается холодным – он рассеивает менее 300 мВт тепла. В конце 1997 года DEC анонсировал новые версии SA-110 – StrongARM SA-1100 с тактовыми частотами 133 и 200 MHz. SA-1100 представляет собой 32-разрядный RISC-процессор с кэшем инструкций размером 16 KB и кэшем данных 8 KB. Основным отличием новых версий от процессора 110 серии, примененном в компьютере Acorn RiscPC, является наличие в серии 1100 встроенных в процессорный чип MMU и подрограмм управления периферийными устройствами. В состав последних входят программы для 4 последовательных многофункциональных портов, параллельного интерфейса, DMA, PCMCIA, драйвер жидкокристаллического дисплея, таймер реального времени, программы диагностики состояния питания процессора. Новые версии процессора были разработаны для внедрения на рынок ноутбуков, карманных электронных записных книжек итд.
Мы сразу поняли, что процессор серии 1100 идеально подходит для нового БК. Изготовленный по технологии полностью статического КМОП, он имеет очень низкие показатели рассеиваемой мощности – 200 мВт на тактовой частоте 133 MHz и 250 мВт на частоте 200 MHz. Скорость вычислений составляет 230 MIPS (согласно Dhrystone 2.1) на частоте 200 MHz. Этот процессор оказался лучшим из всех производимых на планете Земля по соотношению скорость вычислений к рассеиваемой мощности!
 |
| Рис. 1 Структурная схема микропроцессора StrongARM |
Начиная с 17 мая 1998 года производство процессоров StrongARM было перенесено с DEC на INTEL, INTEL же взял на себя дальнейшее совершенствование программных и аппаратных продуктов для серии 1100. DEC отказался от дальнейшей работы в этом направлении по причине того, что было принято решение сконцентрироваться разработке микропроцессора DEC Alpha. Таким образом слоган INTEL INSIDE будет размещен на P3D. Если необходима более подробная информация по процессорам StrongARM, то ее можно получить из Интернет по следующему адресу: http://developer.intel.com/design/strong/
Однако у нас не было данных по защищенности данной серии от воздействия радиации. В большинстве микропроцессоров динамическая память и собственно процессор выполнены по технологии дифференциальных усилителей КМОП с уровнями переключений 100 мВ. Устройства такого рода выдерживают относительно небольшой уровень радиации 1КРАД, а при превышении этого уровня быстро выходят из строя. Процессоры же, выполненные по технологии полностью статического КМОП, сохраняют работоспособность при уровнях радиации на 2-3 порядка выше. Безусловно данные теоретические предпосылки можно было проверить только на практике – исследованием работы микропроцессора в условиях космического пространства. Это стало самым веским аргументом для использования в составе БК именно процессора серии 1100.
После принятия этого важнейшего решения мы быстро сформировали рабочую группу. Менеджер проекта 'Phase-3D' – Karl Meinzer (DJ4ZC) немедленно предоставил нам шанс для установки нового БК на космический аппарат, с учетом того, что все предварительные работы по сборке прошли строго по намеченному графику без задержек, а также по причине того, что не было проблем с небольшим увеличением веса аппарата. Быстро также было найдено свободное место внутри спутника для установки нашего модуля. Вообще против идеи замены старого БК на новый не было сказано ни слова. Наоборот, AMSAT-DL (Германия) выделил средства на финансовую поддержку данного проекта, в связи с тем, что у всех было осознание важности данной работы для будущих проектов по запуску спутников.
В декабре 1997 года в Марбурге (Германия) прошла трехдневная встреча группы разработчиков, на которой были согласованы важнейшие технические детали, в том числе массо-габаритные показатели и параметр потребляемой мощности. Мы стремились к тому, чтобы встраивание нового БК в состав комплекса бортовой аппаратуры требовало минимальных усилий, а также не вызывало чрезмерной нагрузки на кабели. В связи с тем, что потребовалась доработка ранее установленного передатчика на 10 м диапазон, БК был установлен на его место. Таким образом изменения, которые пришлось внести в кабели, оказались минимальными.
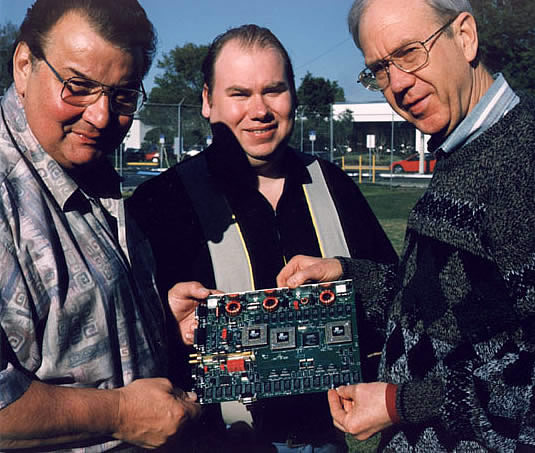 |
| Рис. 2 Werner Haas, Peter Guelzow и Chuck Green с прототипом БК-2 |
Быстро (за кружкой пива) было найдено и оригинальное кодовое имя нового проекта – YAHU – Yet Another Housekeeping Unit (это ещё один бортовой компьютер).
В соответствии с составленным планом мы приступили к работе. По ходу дела у нас появлялись новые идеи. Lyle Johnson проделал основную часть разработки принципиальной схемы и логики FPGA. Каждая разработка в составе проекта обсуждалась нашей группой отдельно и по результатам этих обсуждений Lyle Johnson был признан лидером проекта по созданию нового БК (называемого также БК-2).
Несмотря на то, что БК-2 должен был стать гораздо более сложным изделием, чем старый БК, нам удалось добиться существенной минимизации его размеров за счёт использования так называемых FPGA. Технология anti-fuse в каскадах КМОП-логики достаточно хорошо соответствует требованиям работы в практически открытом космосе. По нашим ожиданиям, БК-2 должен сохранять работоспособность при уровнях радиации 50 К –100 Крад (Si). Всего в составе БК-2 было задействовано три FPGA-компонента – для обеспечения логики загрузки программы, декодера команд, логики памяти, АЦП и т.д.
Участвуя в сборке систем 'Phase-3D' в Орландо (США) в марте 1998 года, Chuck Green представил на суд общественности первый прототип нашего проекта Yahu, установка деталей и пайка которого только-только завершилась. При изготовлении макета использовалась методика поверхностного монтажа. Предварительное тестирование было проведено Lyle Johnson в г. Тусон, Аризона (США). Мастерство Chuck Green, ранее продемонстрированное им на таких аппаратах как предыдущая модель БК и RUDAK, было подтверждено еще раз.
В сравнении со старым БК Cosmac 1802 продукт проекта YAHU - 32-разрядная IPS версия с процессором SA-110 с тактовой частотой 200 MHz - показал быстродействие в 5000 раз больше. Благодаря вертикальной структуре и компактному коду IPS-32 может работать не выходя за пределы двух имеющихся в наличии кэшей. При использовании процессора серии 1100 быстродействие получается еще выше, несмотря на то, что кэш данных сокращен с 16 до 8 KB.
Несмотря на то, что запланированная работа была на 100 процентов завершена, наша группа разработчиков не пожелала убивать время ,наблюдая со стороны за завершением остальных блоков бортовой аппаратуры. Поскольку у нас получился довольно таки быстродействующий аппарат, было решено оснастить его дополнительными функциями. В частности было решено оснастить БК-2 интерфейсом модема, выполняющем аналого-цифровое и цифро-аналоговое преобразования на промежуточной частоте 10.7 MHz. Функции DSP (цифрового сигнального процессора) были возложены на StrongARM. Это должно было позволить в дополнение к увеличению скорости передачи информации использовать другие типы модуляции и кодирования информации, которые например могут понадобиться в ходе экспедиций в более далекий космос – например на Марс.
Но мы решили не ограничиваться и этим и у нас появился план оснащения БК-2 собственным зрением. Последние 12 месяцев в мире интенсивно велись разработки в области камер и микросхем на базе ПЗС-матриц, которые легко интегрируются в состав цифровых модулей. Главным отличием современных ПЗС-матриц от ранее применявшихся является то, что видеоинформация может быть считана из современной матрицы как из обычного ПЗУ. После подачи на вход современной микросхемы координат X и Y , на выход поступает 8-разрядное значение видеосигнала в выбранной точке изображения. Таким образом, ненужным становится сложная синхронизация и оцифровка данных видеосигнала. В дополнение к простоте использования современные камеры на основе ПЗС эффекта имеют значительно более высокие технические характеристики – так, к примеру, динамический диапазон современных камер составляет 120 dB (6 световых декад) – в то время как обычный световой сенсор имеет динамический диапазон не более 60-70 dB. В связи с этим отпадают многие негативные моменты, связанные с применением старых типов сенсоров – к примеру эффект «блуминг – цветение», возникающий из-за перегрузки сенсора.
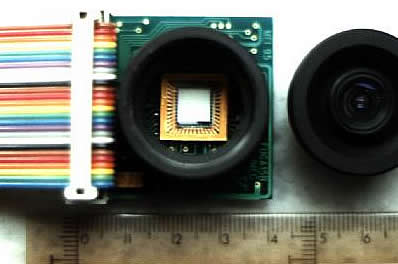 |
| Рис. 3 Современная видеокамера на основе ПЗС-матрицы |
Камера, рекомендованная Peter Guelzow DB2OS, имеет разрешение 512 х 512 точек, разрешение яркостного черно-белого сигнала составляет 8 бит. Аппаратное обеспечение для создания интерфейса такой камеры к БК-2 самое минимальное. Плюс ко всему следует отметить исключительную стойкость камеры нового образца к воздействию радиации – 1 Мрад (сенсоры старого образца сохраняют работоспособность при уровнях радиации не более 10 Крад).
 |
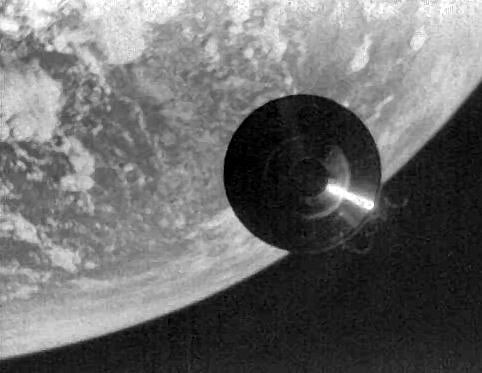
| Рис. 4 Фотография полученная описываемой видеокамерой – демонстрация четкой передачи озображения в условиях сложной освещенности |
Первоначально планировалось смонтировать на спутнике систему из двух камер, разместив одну камеру в верхней, а другую - в нижней части космического аппарата. В итоге планировалось получить фильм YACE (Yet Another Camera Experiment – еще один эксперимент с камерой) – в частности в этом фильме можно было бы увидеть отделение Phase 3D от основного модуля после старта. Сходные изображения были получены с аппарата TEAMSAT, стартовавшего на носителе 'Ариан-502', с использованием такой же системы видеокамер. Однако по ряду технических причин в конечном счете мы остановились на варианте с одной камерой, установленной на верхней части аппарата. Этого все равно оказывается достаточным для съемки изображений Земли, а также камера может быть использована БК-2 как навигационный инструмент для прецизионной ориентации станции относительно Земли, а также в случае необходимости корректировки орбиты. Дополнительно к основной легко в данном случае решается и вспомогательная задача ориентации относительно звезд. Изображения, считанные из камеры, первоначально заносятся в оперативную память БК-2, составляющую 8 МБ. Всего без сжатия информации оперативная память может вместить 32 изображения, однако используя сжатие по стандарту JPEG, количество изображений размещаемых в памяти БК может быть резко увеличено – в принципе в памяти можно разместить даже небольшой видеофильм.
 |
| Рис. 5 Отделение MAQSAT-H от модуля SPELTRA, 15 секунд после старта корабля АРИАН-502 |
Возвращаясь к исходному проекту YAHU, следует отметить, что система команд БК-2 полностью совместима с предыдущей моделью БК, таким образом возможным стало использование предыдущего аплинка управления. Аналогичным предыдущим экспериментам оставлено устройство даунлинка и системы передачи телеметрической информации со скоростью 400 бит/сек через средний маяк. Изначально средний маяк планировалось использовать для работы с радиопередатчиком диапазона 2 м, так как ограниченная полоса рабочих частот транспондера не позволяла поддерживать работу сразу двух маяков – инженерного и общего. Сигнал среднего маяка генерируется матрицей транспондера, после чего подается непосредственно в тракт промежуточной частоты. Этот же маяк оказалось возможным использовать для БК-2 без больших изменений в контструкции аппаратуры – потребовалось добавить всего один провод в кабель, идущий от матрицы к БК-2. Теперь по команде процессора БК-2 берет на себя управление модуляцией среднего маяка. Все радиолюбители, для кого это представляет интерес, смогут принимать телеметрическую информацию со спутника, используя тот же тип демодулятора и программное обеспечение для приема телеметрии со скоростью передачи 400 бит/сек.
Как и предшествующие модели, БК-2 не оснащен никакими ПЗУ, а все программное обеспечение загружается с Земли. Операционная система IPS и рабочее программное обеспечение занимает блок памяти 128К х 32Х3. Логика загрузчика программного обеспечения выполнена аппаратным образом на FPGA компонентах. Дополнительно в распоряжении БК-2 находится 128 KB EPROM флэш-типа, содержимое которого может быть записано, стерто и перезаписано под управлением соответствующей программы. Назначением этого модуля памяти является хранение операционной системы и рабочей программы, для периодической сверки последних с содержимым ОЗУ и в случае возниконовения сбоев, связанных с радиацией, для необходимой коррекции содержимого ОЗУ. В случае серьезного сбоя компьютера, программное обеспечение дает команду на перезапуск БК-2 с использованием резервной версии рабочей программы из флэш- памяти, либо рабочая программа может быть загружена с Земли. Такой дублирующий метод построения системы является очень надежным даже в условиях плохого прохождения радиосигнала. Дополнительно БК-2 оснащен 8 MB незащищенного ОЗУ для хранения изображений, полученных с помощью камеры или в других экспериментах. Так же, как это было сделано на RUDAK и других многочисленных экспериментах, в состав БК-2 включен интерфейс для локальной сети. Наличие локальной сети с пропускной способностью 800 Kbps позволяет производить обмен данными между различными экспериментами внутри спутника. К примеру, изображения, полученные от камеры, могут быть загружены в почтовый ящик RUDAK общего доступа.
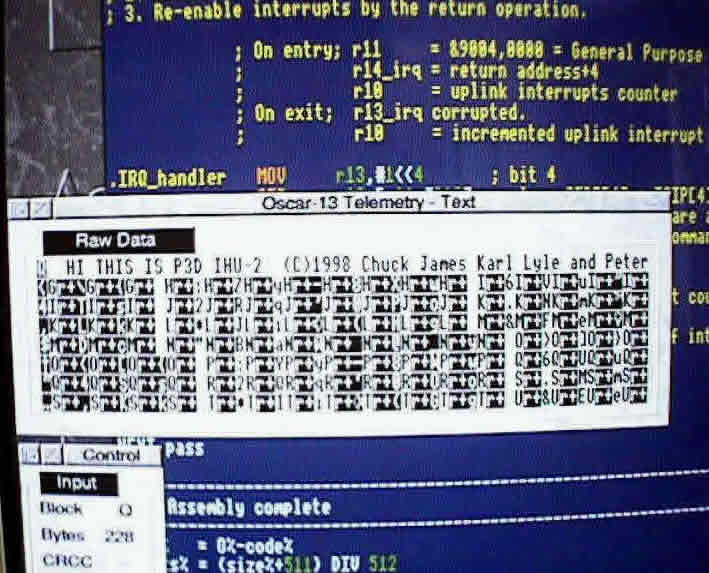 |
| Рис. 6 Первый эксперимент по передаче телеметрии с помощью БК-2 |
Как это отмечалось в начале статьи, разработка программного обеспечения для БК-2 являлась ключевым моментом на стадии тестирования “железа”. James Miller, долгое время являвшийся пользователем компьютеров Acorn и хорошо знающий язык ассемблера для процессоров ARM, взял на себя разработку тестовой программы для первоначальной отладки аппаратуры и программных интерфейсов для 32-битной IPS. Шаг за шагом различные функции БК-2 должны быть протестированы, в них должны были быть внесены окончательные коррекции и тд. Разработку программного обеспечения для процессоров ARM можно проводить на компьютерах, совместимых с РС или на рабочих станциях SUN, однако софт для операционной системы IPS доступен в настоящее время только на компьютерах типа Acorn Risc. Более подробную информацию по этому вопросу можно получить из Инет по следующему адресу: http://www.jrmiller.demon.co.uk/IPS
К апрелю 1998 года работа над созданием БК-2 прошла важную веху – бортовой компьютер оказался в состоянии передать первый блок данных телеметрии. Однако несмотря на этот успех потребовалась очень скрупулезная работа по устранению бугов – в основном все они были связаны с аппаратной частью – компоненты работали не совсем так, как это было указано в описаниях на них, и Lyle Johnson, который проводил эту работу, потратил много времени на переписку с производителями для получения более подробной информации для устранения возникающих проблем. К работе по устранению бугов подключился Chuck Green, а затем James Miller провел часть работ по тестированию в г.Тусон, что позволило существенно сэкономить время, однако все равно работа шла в режиме «от зари до зари».
 |
| Рис. 7 James Miller и Chuck Green на испытаниях БК-2 в г.Тусон, Аризона |
Как только прототип БК-2 показал, что он может устойчиво работать, мы перешли с следующему шагу внашей программе – к встраиванию БК-2 в состав аппаратуры 'Phase-3D', к завершению разработок другого аппаратного обеспечения спутника. Это послужило сигналом для Karl Meinzer, который с самого начала был энтузиастом создания БК-2, что необходимо разработать специальную версию 32-разрядной IPS именно для этого типа RISC-процессора. Наличие специальной версии операционной системы позволит в дальнейшем производить на спутнике гораздо более сложные математические вычисления, необходимые для систем автономного функционирования спутника, ориентации и навигации, управления гироскопами, управления работой видеокамеры в режиме сенсора положения Земли и Солнца. Мы будем информировать Вас о ходе работы в этом направлении, результаты которого позволят нам и всем радиолюбителям – энтузиастам AMSAT, осуществить прорыв в XXI век.
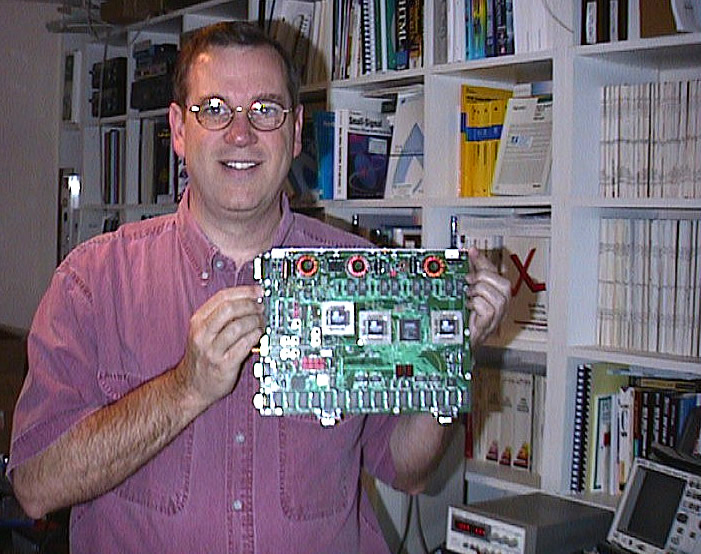 |
| Рис. 8 Lyle Johnson представляет на суд общественности первую версию БК-2, результат проекта YAHU |
---
1999 :: Автор: Peter Guelzow (DB2OS)
Источник: Журнал AMSAT UK, N 133, 08'1998, стр. 32-36
Фотографии любезно предоставлены автором статьи.
Статья переведена, подготовлена к публикации и опубликована творческим коллективом AMSAT-R:
Алексей Матвиец (RU3AIZ), Евгений Лабутин (RA3APR)